Consider a bar of axial length L in the reference configuration. Because
of applying either a temperature change, axial force or an electric/magnetic
field, let its length change to ![]() . Then
. Then
| (4.1) |
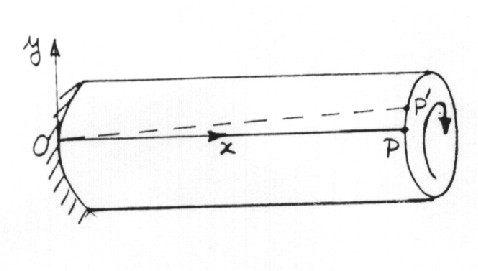
Envisage the twisting of a circular bar fixed at one end. The change in the
angle between two mutually perpendicular line elements passing through a point
is called the shear strain. In Fig. 4.1,
| (4.2) |
We now generalize definitions (4.1) and (4.2) to
three-dimensional deformation of a
body. Infinitely many lines pass through any point Q in
the body and there are infinitely many pairs of mutually perpendicular lines
through Q. The first question is how to denote the axial
strain along these lines and what notation to use for the shear strain between
mutually perpendicular pairs of lines through Q? We use suffixes to
indicate the direction of line elements passing through Q. Thus
exx,eyy,ezz denote axial strains along ![]() and z axes
respectively and
and z axes
respectively and
![]() and ezx denote shear strains between
lines parallel to x and y, y and z, and z and x axes respectively.
For a line element parallel to a unit vector
M the axial strain
will
be denoted by eMM, and the shear strain between two mutually
perpendicular line elements parallel to unit vectors
M and
Nwill be denoted by eMN. The second question is: through
point Q, along how many lines do we need to know the axial strain, and
between how many pairs of mutually perpendicular lines do we need to know the
shear strain so that we can find the axial strain along any line through Qand the shear strain between any two mutually perpendicular lines through Q?
The answer is: three mutually perpendicular lines. Note the
similarity between this answer and the one for stresses in Section 2.
The result for strains is proved below.
and ezx denote shear strains between
lines parallel to x and y, y and z, and z and x axes respectively.
For a line element parallel to a unit vector
M the axial strain
will
be denoted by eMM, and the shear strain between two mutually
perpendicular line elements parallel to unit vectors
M and
Nwill be denoted by eMN. The second question is: through
point Q, along how many lines do we need to know the axial strain, and
between how many pairs of mutually perpendicular lines do we need to know the
shear strain so that we can find the axial strain along any line through Qand the shear strain between any two mutually perpendicular lines through Q?
The answer is: three mutually perpendicular lines. Note the
similarity between this answer and the one for stresses in Section 2.
The result for strains is proved below.